Bài viết này giới thiệu cách sử dụng đơn giản hơn của phép quay Quaternion.
Quaternion được dùng để biểu diễn các phép quay. Chúng ta có thể biểu diễn phép quay Quaternion bởi 4 thành phần x, y, z, w bằng công thức sau:
Q = w + xi + yj + zk
Vì thao tác với Quaternion qua 4 thuộc tính x, y, z, w là một việc cực kì khó, thường thì chúng ta không hình dung được điều gì xảy ra khi thay đổi chúng.
Thay vào đó người ta "chế" ra những cách quay đơn giản hơn dựa vào Quaternion.
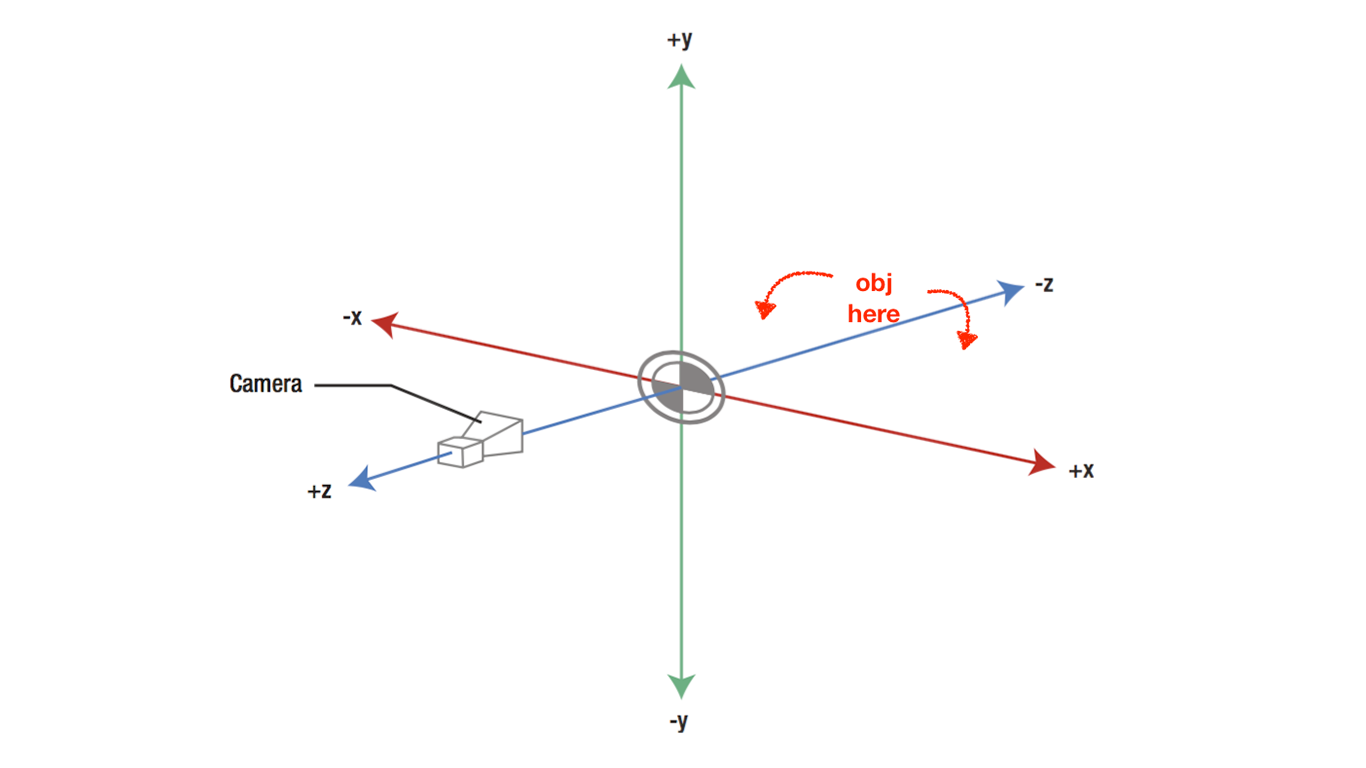
Quaternion Euler - phép quay quanh 3 trục toạ độ x, y, z - nói đến đây bạn chắc có thể hình dung ra được rồi =)).
Quaternion Euler(float x, float y, float z);
Trong đó: x, y, z có đơn vị degree.
Ngoài Quaternion Euler được suy ra từ phép quay Quaternion còn có 2 loại phép quay khác là Quaternion Slerp, Quaternion Lerp. Cái này mình sẽ làm trong một bài viết khác.
Cảm ơn các bạn đã xem.